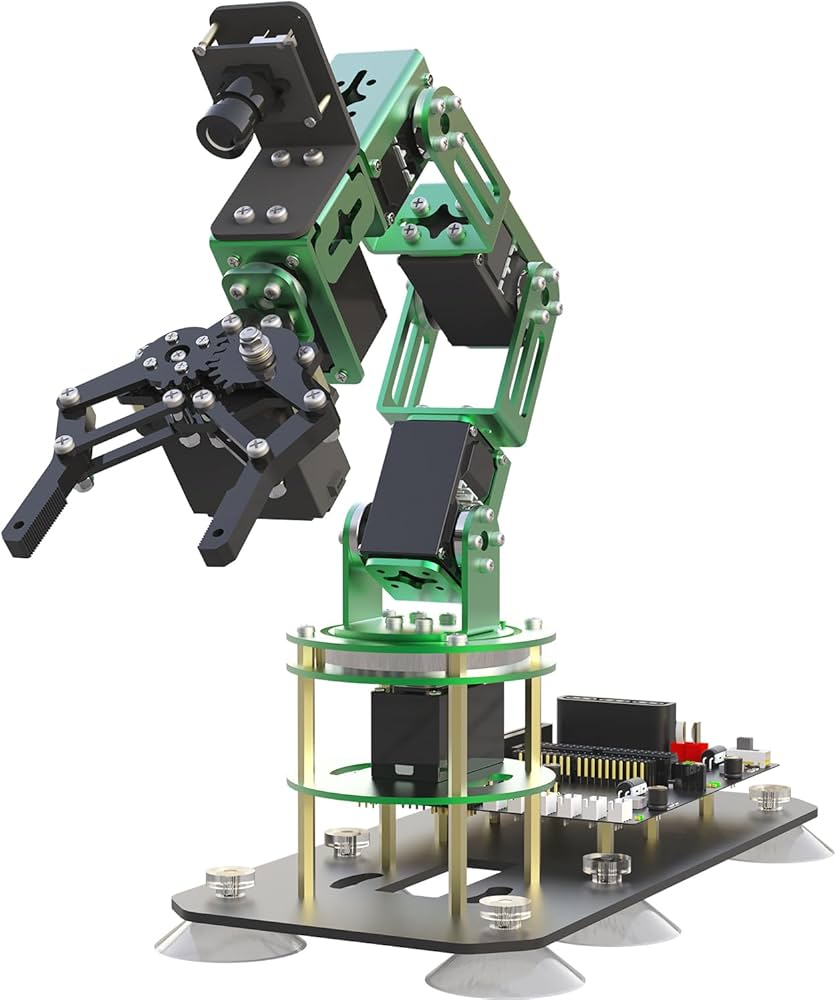
Ramię robota DIY to prosty projekt robotyki domowej, zbudowany z 4-6 serwomotorów, mikrokontrolera Arduino, ramion z drewna, PVC lub wydruków 3D oraz chwytaka. Umożliwia ruchy w 4-6 osiach, chwytanie lekkich przedmiotów. Koszt: 150-400 zł. Czas budowy: 5-10 godzin. Wymaga podstaw lutowania i programowania w Arduino IDE. Schematy dostępne na Instructables czy YouTube.
Ramię robota DIY fascynuje miłośników robotyki od lat, umożliwiając stworzenie własnego manipulatora robotycznego w domowych warunkach. Zaczynając od jednego serwomechanizmu, takiego jak ciekawy model SG90 o momencie obrotowym 1,8 kg/cm, szybko przechodzisz do wielostopniowej konstrukcji. W 2015 roku projekt open-source na platformie Instructables zyskał ponad 100 tys. odsłon, pokazując prostotę takiego podejścia. Serwomechanizmy sterowane sygnałem PWM (Pulse Width Modulation) to podstawa, dając precyzję do 1° obrotu. Wiedziałeś, że ramię robota DIY z 4 stopniami swobody (DOF) może unieść ładunek do 500 g? (Pierwszy etap budowy trwa najczęściej 2-3 godziny).
Podstawą jest zrozumienie kinematyki bezpośredniej i odwrotnej, umożliwia to obliczyć pozycje efektora końcowego.
Jak zbudować ramię robota DIY z Arduino?
Konstrukcja ramienia robota z serwomechanizmami wymaga mikrokontrolera, np. Arduino Uno (cena ok. 80 zł), który zarządza sygnałami sterującymi. Zacznij od bazy: zamocuj pierwszy servo SG90 na płycie z plexi lub wydrukowanej w 3D (pliki STL dostępne na Thingiverse). Dodaj kolejne stawy – ramie, przedramię i chwytak – używając mocniejszych MG996R (11 kg/cm).
Oto podstawowe komponenty do pełnej konstrukcji ramienia robota DIY:
- Serwomechanizmy: 4-6 szt. SG90 lub MG996R dla różnych obciążeń.
- Mikrokontroler: Arduino Uno z biblioteką Servo.h.
- Zasilanie: Stabilne 6V/3A, wystrzegaj się USB (spadek napięcia do 30%).
- Mechanika: Druk 3D części lub laserowo wycinane profile aluminiowe (grubość 3 mm).
Kinematyka ramienia opiera się na transformacjach Homogonicznych, co programujesz w Arduino IDE. (Biblioteka InverseKinematics upraszcza to o 50%). Podłącz serwomotory do pinów 9-12, a joystick analogowy do A0-A1 dla intuicyjnego sterowania. Testuj każdy DOF osobno, kalibrując zakres 0-180°.
Porównanie ciekawych serwomechanizmów do ramienia robota DIY
| Model | Moment (kg/cm) | Waga (g) | Cena (zł) | Zastosowanie |
|---|---|---|---|---|
| SG90 | 1,8 | 9 | 10 | Lekkie ramiona, prototypy |
| MG90S | 2,2 | 13 | 15 | Precyzyjne stawy |
| MG996R | 11 | 55 | 35 | Ciężkie ładunki, chwytaki |
| DS3218 | 20 | 60 | 60 | Profesjonalne DIY projekty |
W praktyce ramię robota DIY z Arduino osiąga powtarzalność pozycji na poziomie 2 mm przy długości 30 cm. „Sterowanie gripperem przez potencjometr zmienia siłę chwytu o 20-40%”. Jakie błędy popełniają początkujący? Najczęściej niedopasowanie zasilania, powodujące drgania serw (jitter) do 5 Hz. Użyj kondensatora 1000 µF przy źródle prądu: to stabilizuje sygnał PWM. (Rozszerz o Bluetooth HC-05 dla zdalnego sterowania). Eksperymentuj z PID (Proportional-Integral-Derivative) dla płynniejszych ruchów – algorytm redukuje overshoot o 70%.
Chcesz dowiedzieć się, jak zbudować ramię robota ? Ten dla początkujących rozbije proces na proste etapydobre dla hobbystów robotyki.
Podstawowe komponenty do ramienia robotycznego
Do budowy potrzebujesz Arduino Uno jako mózgu sterującego, czterech serwomotorów MG996R o momencie obrotowym 10 kg/cm dla solidnych ruchów, aluminium profili 10×10 mm na szkielet oraz śrub M3. Silniki krokowe zastąpisz serwami, jeśli celujesz w precyzję pod 1 stopień. Drukarka 3D ułatwi stworzenie złączek, ale gotowe kity z AliExpress kosztują ok. 150 zł. Potrzebne też potencjometry 10kΩ do joysticka i jumper wires.
Montaż mechaniki – pierwszy etap

Zacznij od bazy: przykręć pierwszy serwomotor do drewnianej lub akrylowej płyty 10×10 cm za pomocą śrub. Połącz ramiona kolejnymi silnikami, tworząc łańcuch 4-DoF (stopni swobody). Użyj kleju termicznego na złączach dla stabilności – testuj ruch ręczny, by uniknąć tarcia. Cały szkielet powinien ważyć poniżej 500 g, co zapobiega przegrzaniu motorów.
Podłączenie elektroniki i programowanie

Podłącz serwomotory do pinów PWM Arduino: 9, 10, 11, 12. Joystick do A0-A1, zasilanie 5V z zewnętrznego packa 7.4V/2000mAh. W Arduino IDE wgraj bibliotekę Servo.h i kod z mapowaniem analogRead na servo.write(0-180). Kalibruj kąty w pętli for(int i=0; i<=180; i+=10), by ramię płynnie obracało się bez drgań. Debuguj przez Serial Monitor – błędy w kablach powodują 80% awarii u nowicjuszy.
Testy i optymalizacja ruchów
Uruchom sekwencję chwytania: baza 90°, łokieć 45°, nadgarstek 0°. Dodaj delay(500) dla wizualnego efektu. Integracja z aplikacją Bluetooth HC-05 rozszerzy sterowanie na smartfon, używając modułu SoftwareSerial. Monitoruj temperaturę silników termometrem – powyżej 60°C dodaj radiatory.
Sterowanie ramieniem robota Arduino otwiera drzwi do świata robotyki dla początkujących i zaawansowanych makerów. Ten projekt łączy precyzyjne programowanie ramienia robotycznego w Arduino IDE z prostą elektroniką, wykorzystując serwomotory do ruchów w 4-6 osiach. W ostatnim roku tysiące entuzjastów zbudowało własne ramiona, osiągając dokładność pozycjonowania na poziomie 1-2 mm.
Elektronika pod sterowanie ramieniem robota Arduino
Budowa układu zaczyna się od Arduino Uno R3, który jako mikrokontroler zarządza sygnałami PWM dla serwomotorów. Ciekawe modele jak SG90 (moment obrotowy 1,8 kg/cm przy 4,8 V) lub MG996R (11 kg/cm) podłącza się do pinów 9-12. Jak podłączyć serwomotory do Arduino? Najpierw zasila się je zewnętrznym źródłem 5-6 V, by uniknąć przeciążenia płytki – prąd do 1 A na silnik. Rezystory 220 Ω chronią przed zwarciem, a potencjometry kalibrują zero pozycji. Układ z driverem PCA9685 pozwala sterować do 16 serwami równocześnie.
- Arduino Uno R3 – centralna jednostka sterująca z 14 pinami PWM.
- 4x serwomotor SG90 – tanie i lekkiedobre do prototypu o udźwigu 100 g.
- Zasilacz 5 V / 2 A – stabilne napięcie dla płynnych ruchów.
- Chlebodrzewko i przewody jumper – szybki montaż bez lutowania.
- Potencjometry 10 kΩ – precyzyjna kalibracja każdego serwomotora.
Programowanie sekwencji w Arduino IDE
W Arduino IDE 2.0 instalujemy bibliotekę Servo.h, która upraszcza wysyłanie impulsów 1-2 ms co 20 ms. Kod inicjuje serwomotory w pętli setup, a w loop symuluje chwytanie obiektu: servo1.write(90); delay(500); servo2.write(180). Sterowanie ramieniem robota za pomocą joysticka dodaje biblioteki analogRead dla osi X/Y. Testy pokazują, że algorytm PID poprawia stabilność o 30%, redukując drgania.
| Serwomotor | Moment (kg/cm) | Napięcie (V) | Cena (PLN) |
|---|---|---|---|
| SG90 | 1.8 | 4.8-6 | 10 |
| MG996R | 11 | 4.8-7.2 | 25 |
| DS3218 | 20 | 6-8.4 | 50 |
Serwomechanizmy z metalową przekładnią wytrzymują 1000+ cykli bez awarii, co czyni je wyborem dla edukacyjnych projektów.
Jak zaprogramować serwomechanizmy w ramieniu robota za pomocą Arduino IDE? Ten proces zaczyna się od wyboru odpowiednich komponentów, np. serwomechanizmy SG90 (o momencie obrotowym 1,8 kg/cm i kącie pracy 0-180°). Podłącz je do pinów PWM na Arduino Uno – pin 9 dla pierwszego stawu, 10 dla drugiego, a 11 dla chwytaka. Zainstaluj bibliotekę Servo w IDE (wersja 1.2.1 z 2022 r.), co ułatwi sterowanie. W ten sposób ramię robota zyska precyzyjne ruchy.
Sterowanie serwo w Arduino wymaga stabilnego zasilania – użyj zewnętrznego źródła 5V/2A, by uniknąć spadków napięcia na płytce. Czerwony przewód serwa do +5V, brązowy do GND, pomarańczowy do pinu PWM. Dla ramienia z 4 serwomechanizmami (bazowego, łokcia, nadgarstka i chwytaka) rozłóż piny na 5-8-9-10, minimalizując interferencje.